Graph
A graph is a set of vertices (points) connected by edges (lines).
We use specifics graph algorithms to efficiency resolve related problems.
Structure
: graph : vertices. The nodes of the graph. : edges. Directed or undirected links between the vertices.
Adjacency matrix
An adjacency matrix helps to quickly look up a single edge and allows for quick addition of edges.
The graph must be (almost) complete and it can cost performance depending on its size.
Performances
- Browse a row or a column of the matrice (adjacent node/edge):
- Store the matrix:
- Browsing all edges of the graph:
Adjacency list
An adjacency list provides quick lookup of one vertex and allows for quick addition of new edges and vertices. However, searching for a single edge requires traversing the entire list.
Performances
- Store the lists:
- Browse all vertices of the graph:
- Check if
is a vertice: - Browse adjacent vertices of
:
Types
Directed vs. undirected
(WIP)
Eulerian vs. Hamiltonian
- Eulerian path: a path that visits each edge of the graph only once
- Hamiltonian path: a path that contains each vertex only once (e.g. Traveling Salesman)
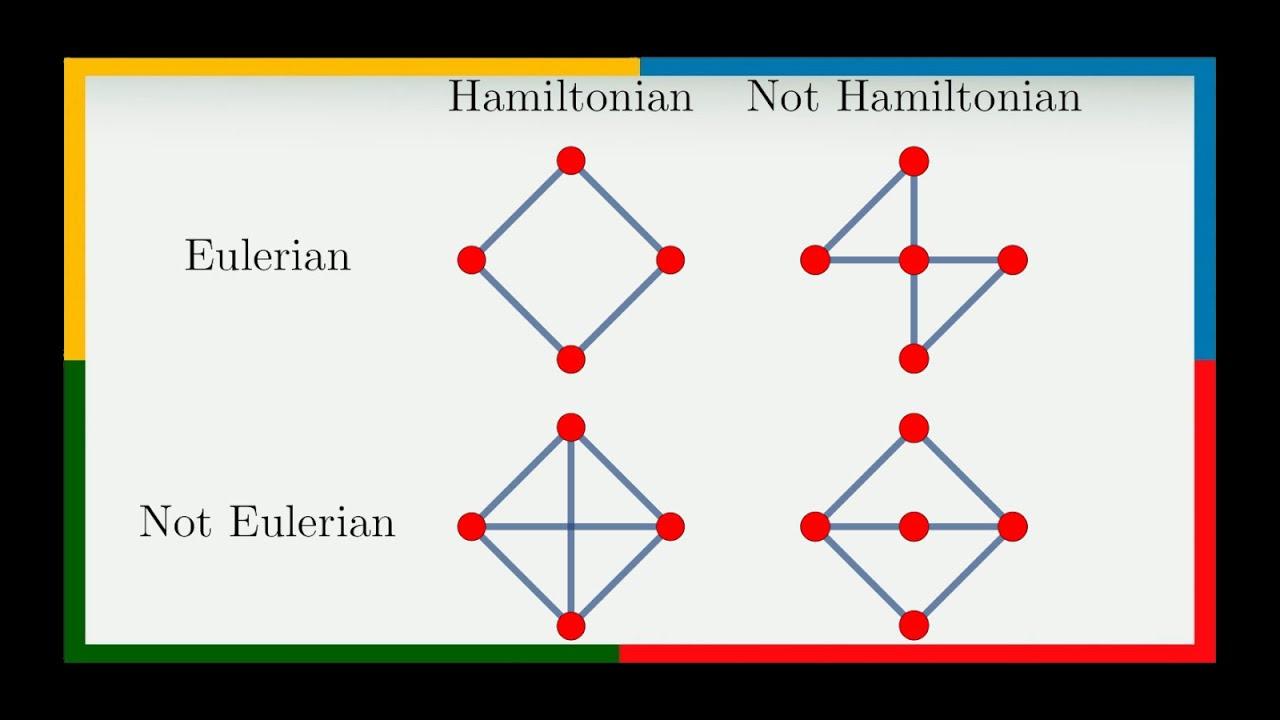 Source: VisualMath – Youtube
Source: VisualMath – Youtube
Bipartite
A graph is bipartite if the vertices can be split into two subsets
Clique
A clique is when you take a subset of vertices and all these vertices are connected together.
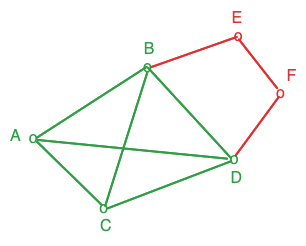
On the left,
Algorithms
- Find if path exists between 2 nodes
- Directed graphes: Tarjan, Kosaraju
- Undirected graphes: DFS, BFS
- Find shortest path between 2 nodes
- Bellman-Ford
- Dijkstra (positive weights only)
- Floyd-warshall (positive and negative, find shortest path for all nodes)
- Connect all vertices together with edges subsets (Minimum Spanning Tree)